Flying Car Nanodegree
January 2021 - May 2021
I recently took the Flying Car and Autonomous Flight Engineer Nanodegree, an intensive 4-month online course through Udacity that covers introductory flight software engineering and algorithms for aerial vehicles.
I learned and implemented planning, controls, and estimation algorithms for flying vehicles. Through the project-based curriculum, I built a complete software stack for autonomous quadrotors:
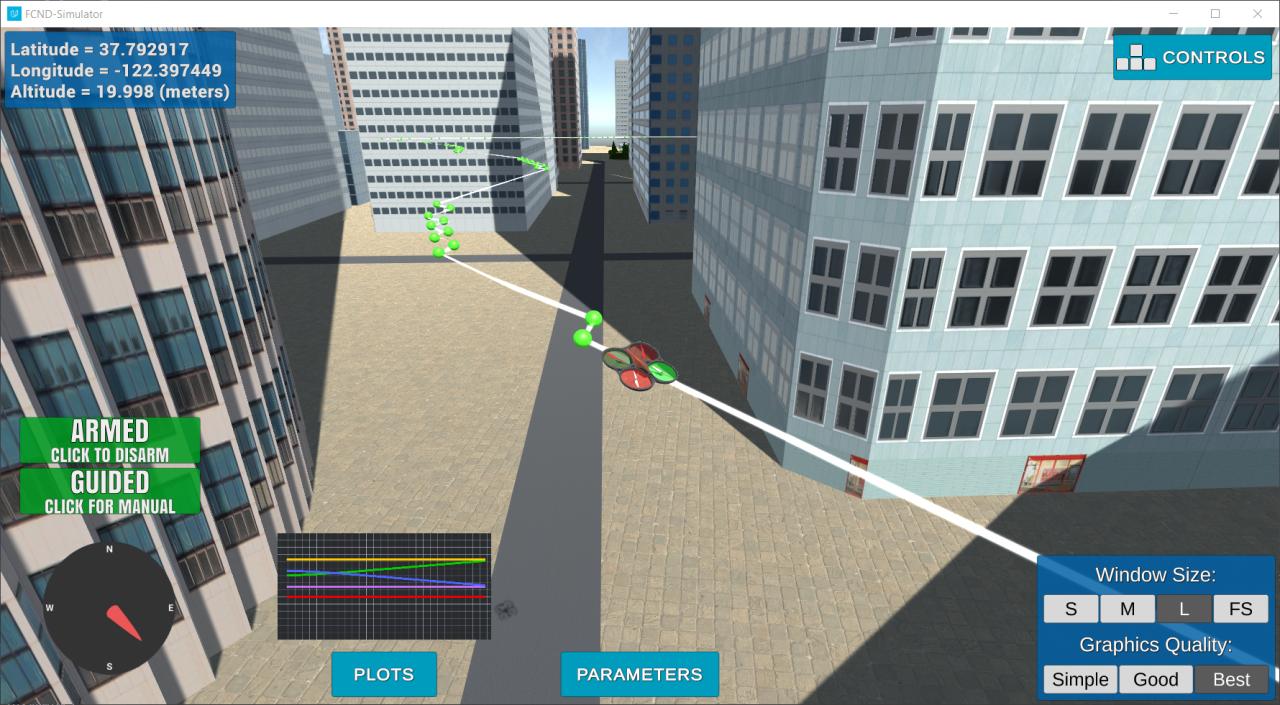
- Built a 3D motion planner for a simulated autonomous quadrotor in an urban environment, utilizing A* graph search
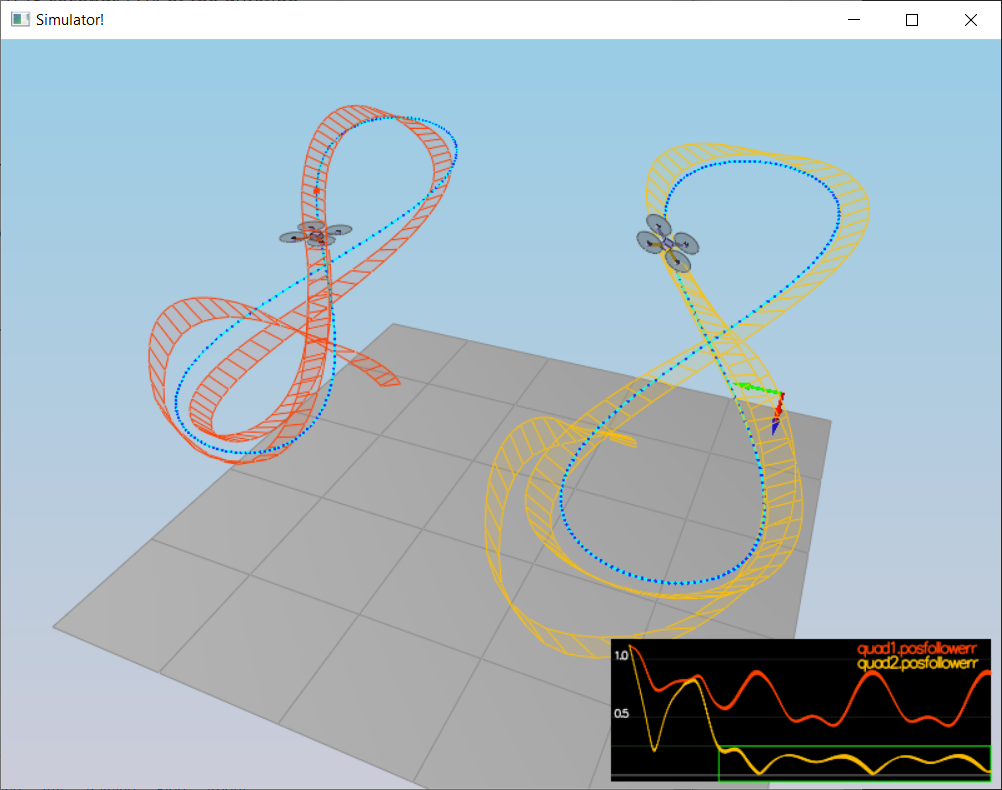
- Implemented a non-linear cascaded PID controller for quadrotor motion.
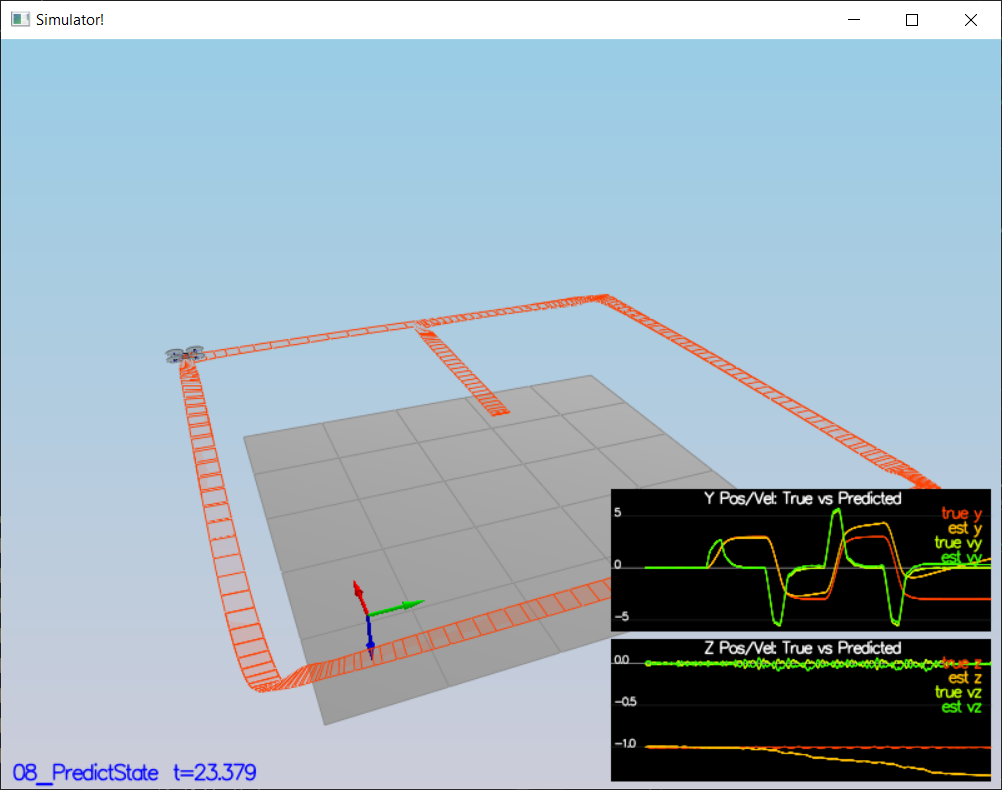
- Designed an Extended Kalman Filter (EKF) to estimate attitude and position from IMU and GPS data. Combined the EKF with the controller from the previous project, and tuned parameters in a simulation to support flight.
The course was a great introduction to the fundamentals of controls for autonomous flying vehicles, and I look forward to continuing to learn in this growing field.
My course projects and exercises are available on GitHub.